Agriculture 2.0: AI and Lasers on a Quadruped Robot
44 views
The Idea
The idea is to implement a fully autonomous quadruped robot that navigates rough farm terrain, detects invasive weeds in real-time, and destroys them using a high-precision laser. Basically, we are building a completely chemical-free weed control system from scratch.
The Problem
So what are we trying to solve? Weeds cause massive yield losses globally. Sometimes this reaches up to 32-34%. The traditional solution relies heavily on chemical herbicides. These chemicals are expensive, ruin soil fertility over time, and leave residues that complicate crop exportation. We need a system that requires zero chemicals and produces zero waste.
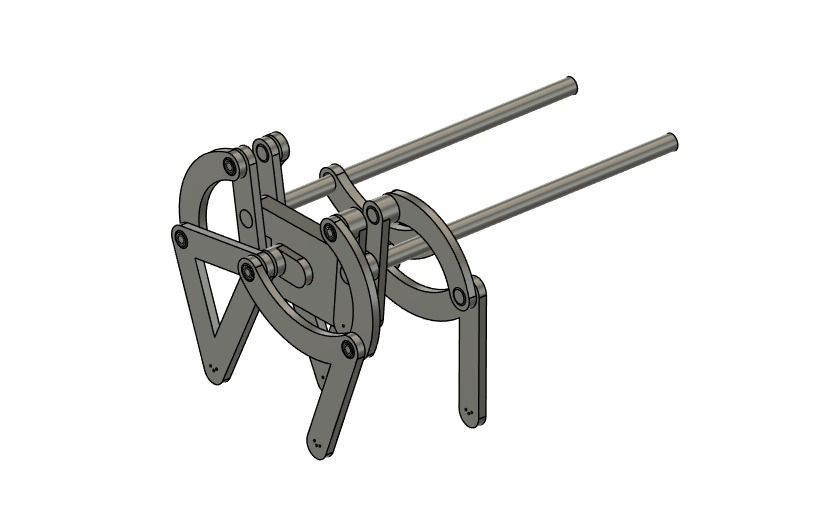
Mechanical Design: Strider's Linkage.
First, we needed a chassis that could handle unpredictable agricultural terrain where traditional wheeled robots usually struggle. We decided to go with a Strider's Linkage mechanism. It provides excellent maneuverability and high energy efficiency over uneven ground.
We have designed and manufactured a lightweight, modular chassis using 3D-printed ABS. This makes the physical structure incredibly easy to maintain, repair, or upgrade directly in the field.
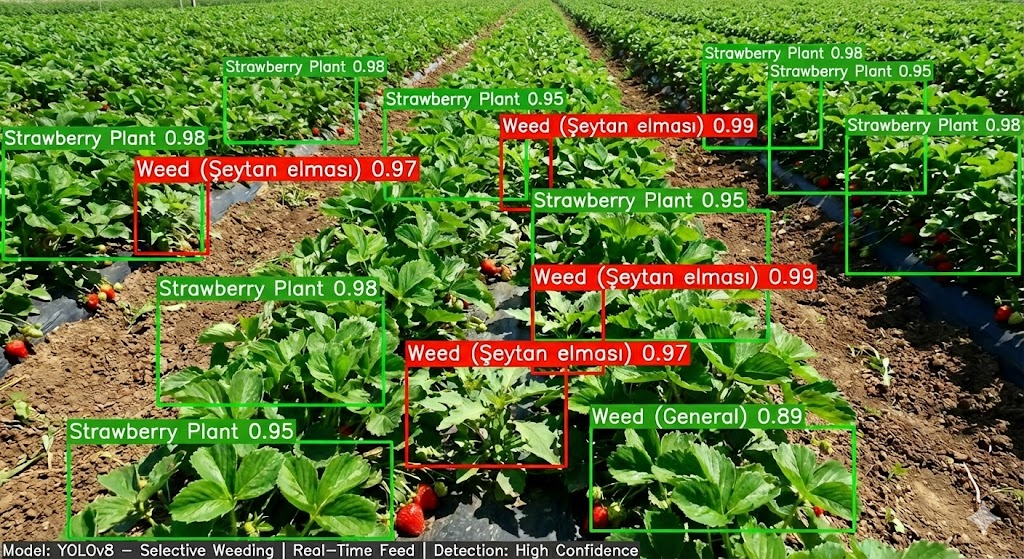
Real-Time AI Detection
The biggest challenge with selective weeding is accurately identifying the target plant in a chaotic visual environment. We are currently fine-tuning a deep learning vision system trained on datasets of field environments. The onboard camera feed is processed in real-time, allowing the AI to act as our primary decision mechanism. It successfully distinguishes between the actual crop and harmful weeds like Şeytan elması with high confidence.
Laser Eradication
Once the weed is detected, how do we get rid of it? Most autonomous weeders still use mechanical blades or micro-sprays of chemicals. We took a different route and chose lasers.
The system calculates the exact coordinates of the identified weed and targets it with a concentrated laser beam. The plant is neutralized in seconds, leaving the surrounding soil and crops completely untouched.
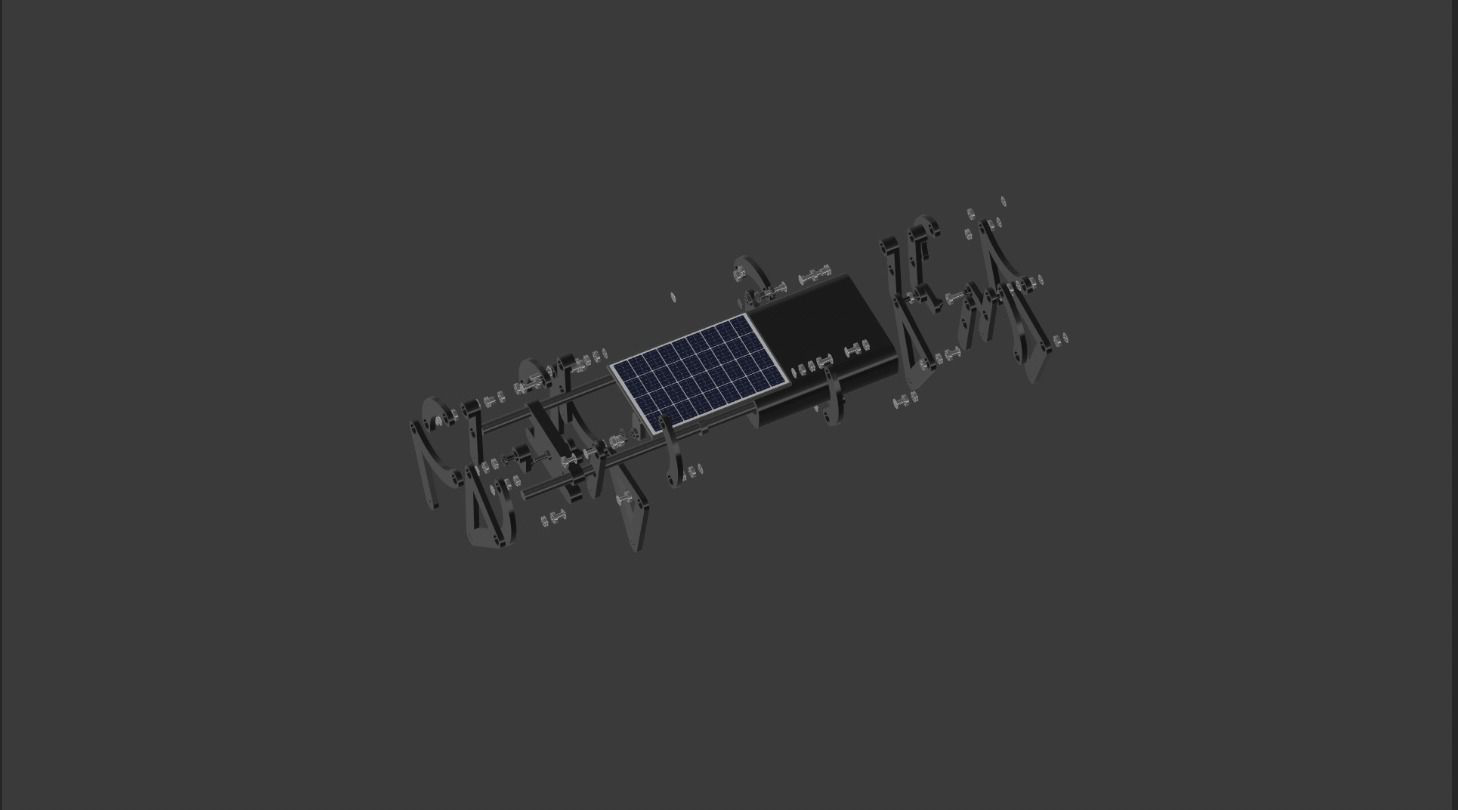
Power & Efficiency
Because the system runs autonomously in open fields, power consumption is a major design factor. The main drive motors, computing hardware, and laser systems draw their primary power from the onboard battery pack. To help offset this load, we integrated a solar panel directly onto the top of the chassis. While this solar panel only provides a small fraction of the total power required, it acts as an auxiliary trickle-charger to help extend the operational time of the system during long daytime deployments.
Nearing the Finish Line
We are currently pushing hard as we approach the final integration and testing phases. The core mechanical design is complete, and the AI models are running efficiently. The next major step is full open-field testing. We are incredibly close to having a fully functional prototype ready. We are not just building a robot; we are redefining what sustainable agriculture looks like.